

Virtual Tournament 7/31/21
Robocar Virtual Tournament7/31/2021 NEW TRACK! https://youtu.be/bE8LnOQ3PfQ Triton AI gets second place with Jetsim on the new circuit launch track in the final latter of Virtual
COSMOS High School Workshop
COSMOSHigh School virtual Workshop7/14/2021 Triton AI had the opportunity to conduct a virtual programming workshop for the COSMSOS Autonomous driving summer program! 25+ High school
Circuit Launch Tournament 5/22/2021
Circuit Launch Tournament May 22, 2021 Full Tournament video After more than a year of virtual and outdoor events we were finally able to compete

Jetracer Optimized
Jetracer Autonomous DIY Optimized https://youtu.be/fgqukxg3LHc The Triton AI Jetracer team has cracked the code for the NVIDIA Jetracer DIY, optimizing how the Jetracer steering and

Jetsim’s First Tournament
Jetsim’s first Virtual Tournament This was the first tournament that I entered using Jetsim. Andrew and I spent a lot of time and effort into

Jetsim
Jetsim is Alive! https://youtu.be/OslGWZIrPxMThe Triton AI Jetracer team has successfully built an autonomous driving model in the Donkeycar simulator using NVIDIA’s open source Jetracer framework.
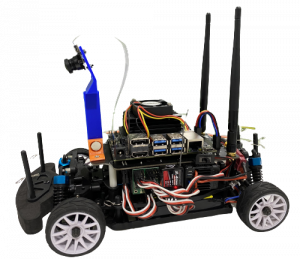
Jetracer Pro Modification
Waveshare Jetracer Pro gets modified https://youtu.be/bwDbZgUgWmc Triton AI has added some modifications to the Waveshare Jetracer Pro kit! It is now controlled via radio controller
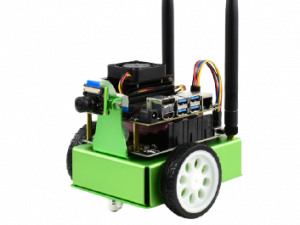
Jetbot
Jetbot https://youtu.be/-KbXeafMG50 Team Jetracer is experimenting with the Waveshare Jetbot to understand how Pytorch works in detail. Jetbot and Jetracer have a lot in common